Project Details
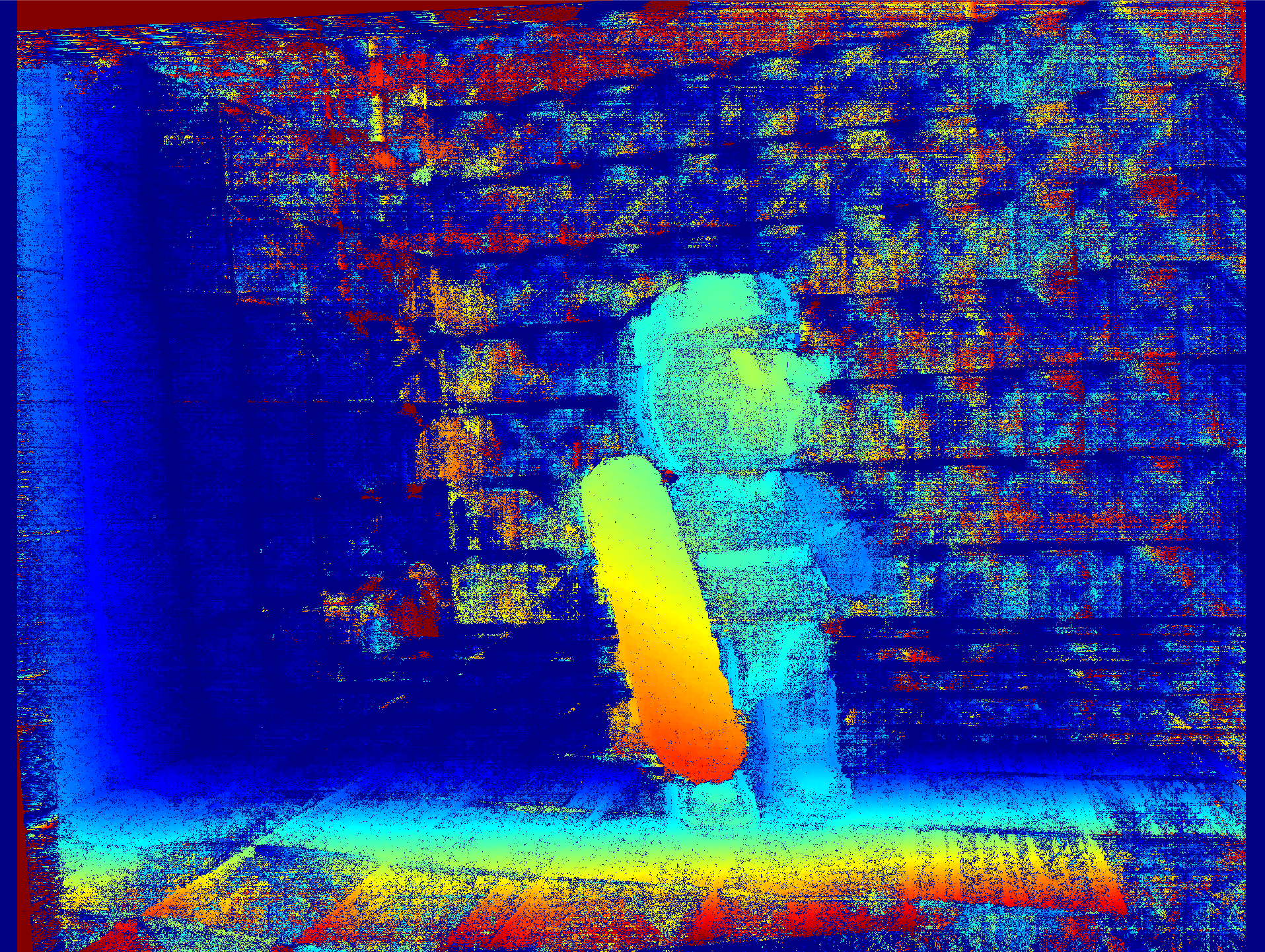
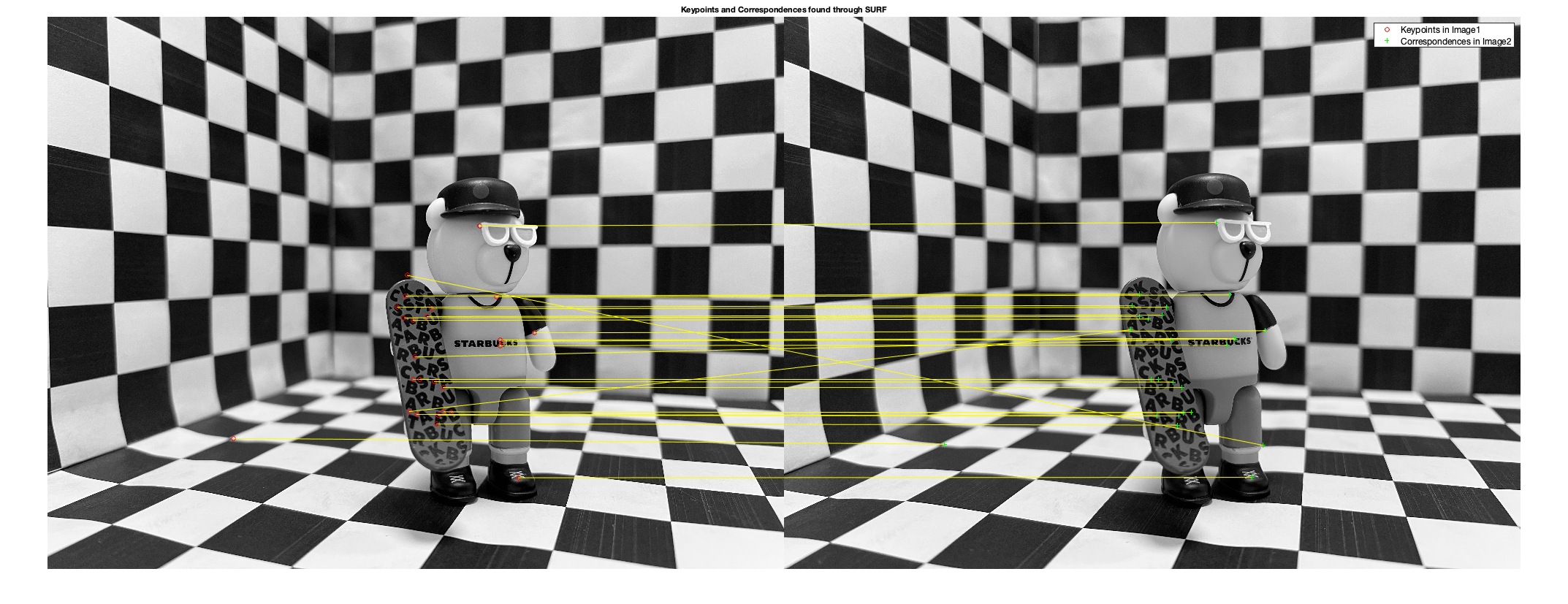
In this project, we (team of 2) investigated different techniques used in the field of computer vision with the final aim of detecting and visualising the depthness of object. This project starts by collecting image data using a calibration grid and a small toy is used as the study object as shown below. During the project, different algorithms are tested to find the correspondences between images to estimate the homography and fundamental matrix. Stereo rectification is also applied to selected image data to simplify the process of finding correspondences between the two images. Rectified images are then used for stereo matching, which involves computing the depth information from the disparity between correspondences. Note that not all techniques explored in the report are utilised to produce the final depth map.
Report Content
- Data Collection
- Keypoint Correspondences
- Transformation Estimation
- Camera Calibration
- 3D Geometry
Sneak Peek - Report