Project Details
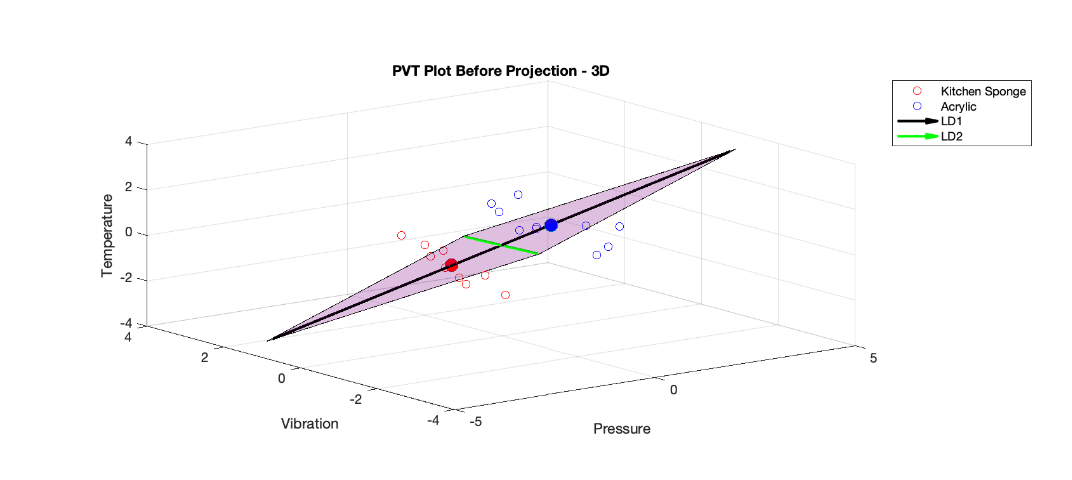
In this project, we (team of 2) investigated whether robots can also identify objects by touch using large and complex data set collected with some very expensive hardware by at the University of Pennsylvania’s GRASP lab where a PR2 robot equipped with two BioTac tactile sensors on its 2 finger gripper was used. The robot manipulated several different objects while various tactile data (pressure, temperature, vibration and 19 electrode measurements) were collected for analysis in this project.
Content
- Data Preparation
- Principal Component Analysis (PCA)
- Linear Discriminant Analysis (LDA)
- Clustering & Classification
Sneak Peek - Report