Project Details
This project involves modelling the robot using matlab to understand the principles of inverse kinematics by assigning co-ordinate frames to the robot and create a graphical simulation of the robot. After that, robotic arm is applied to pick and place wooden blocks using the inverse kimematics developed specifically for the robot. It is also used for picking up pen and drawing a pattern on a sheet of acrylic. Finally, my teammate and I programmed the robotic arm to act as part of futuristic pub/bar that allows customer to interact with robotic arm by giving specific token of different shapes to the robot arm to instruct the robot to perform different tasks such as handing food and pouring alcohol shot.
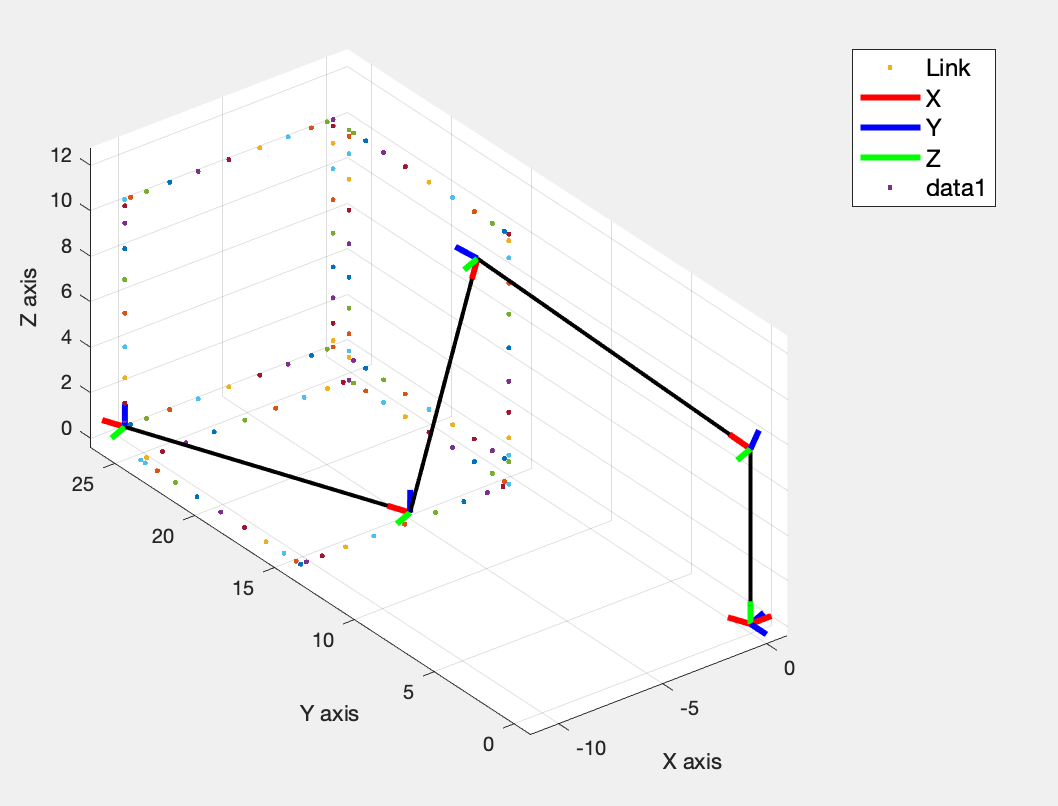
Milestone 1 - Modelling the Robot using MATLAB
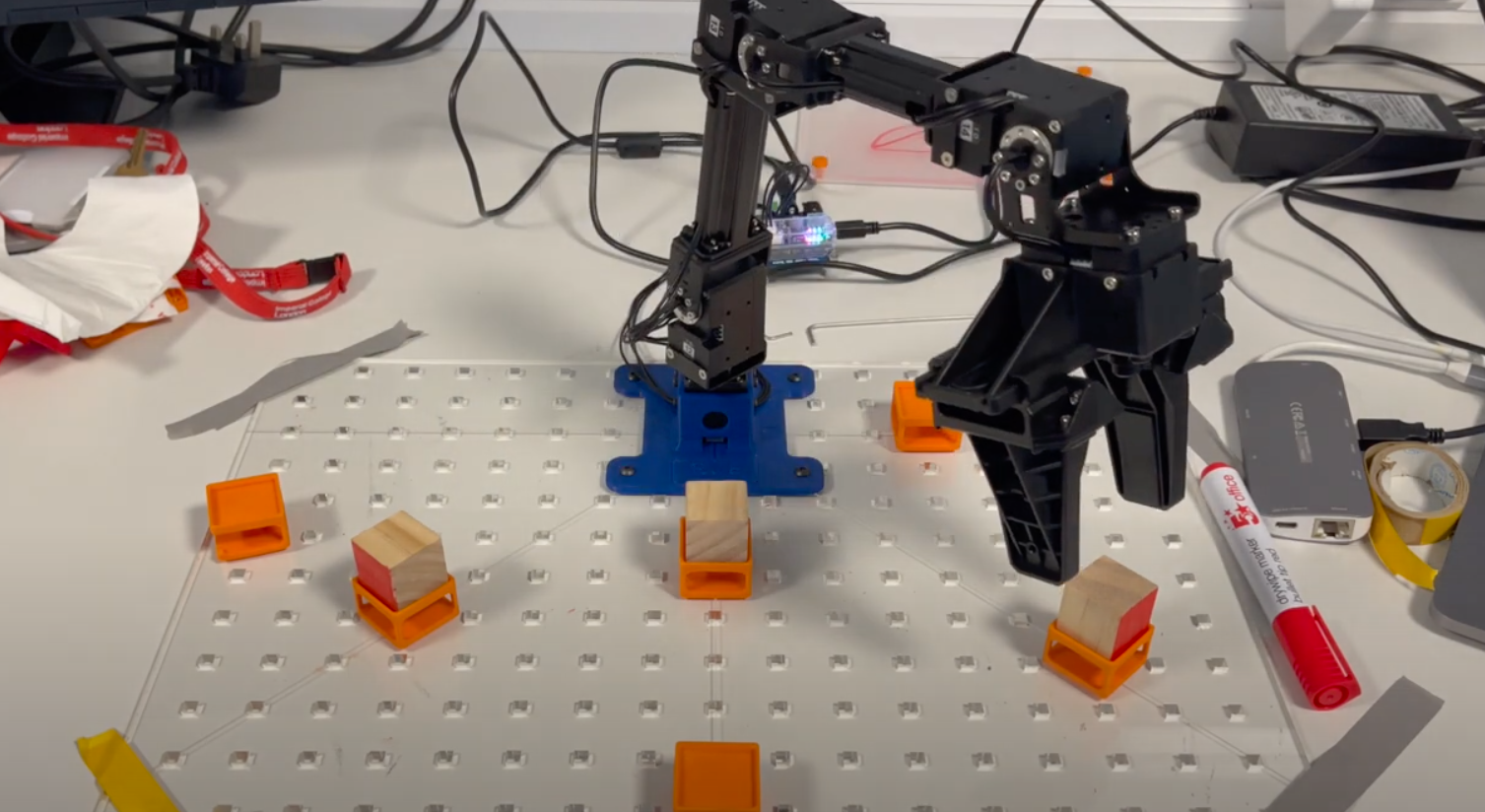
Milestone 2 - Pick and Place (Wooden Blocks)
Milestone 3 - Trajectory Following (Drawing)
Milestone 4 - Interactive Bartendering